成都汇阳投资关于智能体时代来临,具身智能有望成为最佳载体
【具身智能临近 IPHONE 时刻】
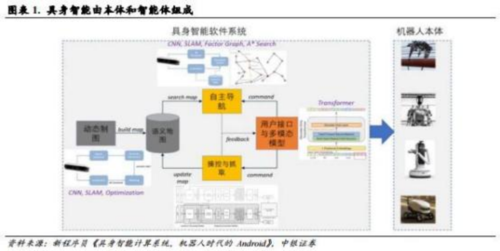
具身智能是一种基于物理身体进行感知和行动的智能系统,其通过智能体与环境的交互获取信息、理解问题、做出决策并实现行动。具身智能的核心要素包括本体和智能体。本体作为实际的执行者,在物理或虚拟世界负责感知和执行任务,而智能体则是具身于本体之上的智能核心,负责感知、理解、决策、控制等核心工作。
区别于机器人,具身智能具备自我决策能力。根据卢策吾教授在机器之心AI 科技年会上发表的《具身智能是通往 AGI 值得探索的方向》中提到,智能体通过感知器和执行器与环境进行交互后,能够实现获取信息、理解问题等功能, 并根据环境的变化做出相应的决策和行动。
2023年,GPT-4 Turbo发布,其参数量高达1.8万亿。2024 年4月,国内商汤科技“ 日 日新 ”大模型体系正式发布,其中中文语言大模型参数达1800 亿。随着大模型参数量的大幅增长传统穿戴设备、手机等无法消化大模型大算力。 从目前市场上的端侧大模型来看,通常设备端越大(功能越多),其端侧大模型的参数量也越大。
而具身智能需要处理更复杂的任务,如环境感知、运动控制、决策制定等, 其算法和模型需要快速处理大量数据并做出决策,因此具身智能需要更大的模型参数来支持其更广泛的功能和更高的智能需求。谷歌开发的 PaLM-E 具身多模态大模型参数量达 5620 亿;华为盘古 Pangu S 大模型参数达万亿。相比小型端侧设备,具身智能机器人能够消化大模型、大算力!

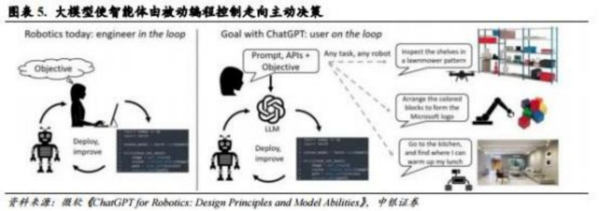
大模型使智能体由被动编程控制走向主动决策。与智能体结合后,具身智能以任务目标为导向,不仅仅是机械地完成程序,其可以根据环境变化,对行动细节进行实时修正,并消除在特定条件下为特定任务反复编程的需要。依托大模型的涌现能力,具身智能能够从原始训练数据中学习并发现新的特征和模式,在仅仅依靠网络数据知识的情况下就可以对从未见过的对象或场景执行操作任务。
【仿真为智能体赋能的主流路径】
主流的具身智能训练方法主要包括遥操作、动捕、大模型等。其中,单一的遥操作或动捕需由人类操作员直接控制,无法实现机器替人。大模型和智能体深度融合,具备较强泛化型。在数据选择上,可采用仿真数据或真实数据。
仿真通过构建虚拟环境生成大量数据,成本较低,适合在新的环境中大范围学习技能;利用真实数据能够形成细分场景的数据壁垒,但成本及获取难度相对较高。
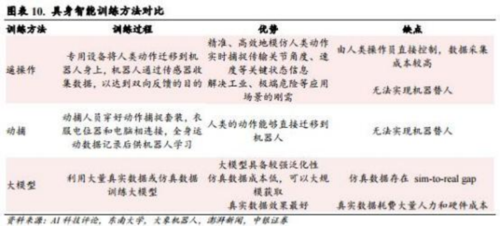
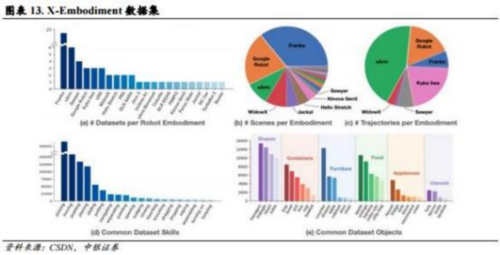
大模型具备较强泛化性,仿真数据有望大范围应用。谷歌 RT 采用该种技术路径。谷歌在 RT-1 和 RT-2 的框架上使用 X-Embodiment 数据集进行训练,该数据集包含在 22 个机器人上采集的能够完成 16 万个任务的上百万条数据。其中,RT-1充当小脑层级的控制器,由大模型负责顶层理解和指令分解,例如打开抽屉、将物体从抽屉里拿出来等。RT-2 采取端到端路径,将语言、动作 tokens 进行对齐,微调后得到 VLA 模型,使得模型能够通过视觉输入和语言指令生成正确的动作标记序列。大模型使机器人从 Model-Based 向 Learning-Based 转变,在解决复杂和高维度的运动控制问题上具备更高的上限。但是大模型的训练需要海量数据,按数据来源分类,可分为真实数据和仿真数据。真实数据效果最好,但需要耗费大量人力和硬件成本。仿真数据成本低,可以大规模获取,但通常存在 sim-to-real gap。
【数据是具身智能发展的核心】
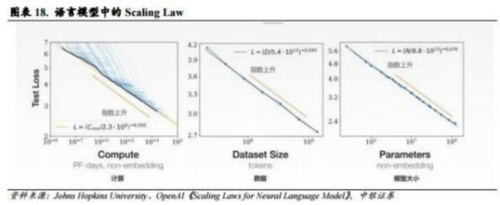
小模型时代算法的数量和质量对于机器人至关重要;然而大模型的 Scaling Law 表明通过增加数据量、扩大模型规模以及延长训练时间,可以实现模型性能的持续提升,数据重要性凸显。并且不同于语言、图像或视频等二维模型的训练, 具身智能底层模型的训练,需要在物理世界绝对坐标系下的精确测量数据,数据获取难度、成本、标注周期都远超语言模型。
从产业发展进程看,类比自动驾驶,特斯拉大规模采集的数据推动了 FSD 性能的提升,具身智能产业发展的核心在于数据。
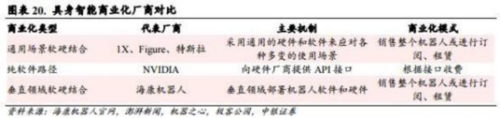
区别于大模型可以从网络中获取数据并进行训练,具身智能如果想要具备高泛化性和可靠性,则需要在真实物理世界里获取数据来完善模型,而获取真实物理世界的数据的关键就在于商业化落地。根据 1X AI 副总裁 Eric Jang 在个人博客网站上发表的“All Roads Lead to Robotics ”一文,具身智能的商业化路径主要包括三种:通用场景软硬结合、 软件路径、以及垂直领域软硬结合。
从具身智能训练层面,建议关注具备柔性、流体仿真等技术的厂商,如索辰科技。从具身智能商业化路径层面,建议关注英伟达、华为合作厂商,如九号公 司、中坚科技、高新兴、润和软件、安联锐视等以及细分领域龙头厂商如海康机机器人。
我们筛选出以下潜力标的
中坚科技(002779)2024年 2 月份,公司根据经营及战略发展的需要,公司拟与兆新股份全资孙公司香港兆新实业共同设立海外SPV 公司,并通过 SPV 公司投资海外人工智能机器人 1XHoldingAS 公司。

索辰科技(688507)公司 2024 年成立的机器人事业部:该部门的使命在于开发针对机器人行业的专业软件和解决方案。公司的机器人设计软件将涵盖并联机器人(包括人形机器人)本体的完整研发过程,从功能设计、构型综合、性能分析到结构设计优化。

安联锐视(301042)公司自主研发了监控行业的人工智能 AI 技术应用,如人脸识别技术、人形侦测技术、车型侦测技术。

参考资料:中银证券-智能体专题报告之二:智能体时代来临,具身智能有望成为最佳载体.pdf
免责声明:本文由投资顾问: 冯利勇(执业证书编码:A1280620060001)、罗力川(登记编号:A1280622110002)等编辑整理,仅代表团队观点,任何投资建议不作为您投资的依据,您须独立作出投资决策,风险自担。请您确认自己具有相应的权利能力、行为能力、风险识别能力及风险承受能力,能够独立承担法律责任。 所涉及个股仅作投资参考和学习交流,不作为买卖依据。投资有风险,入市需谨慎!
<< 上一篇
网友留言(0 条)